
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖC(j©®)Ų„╚╦ |
| CHUANGZE ROBOT |
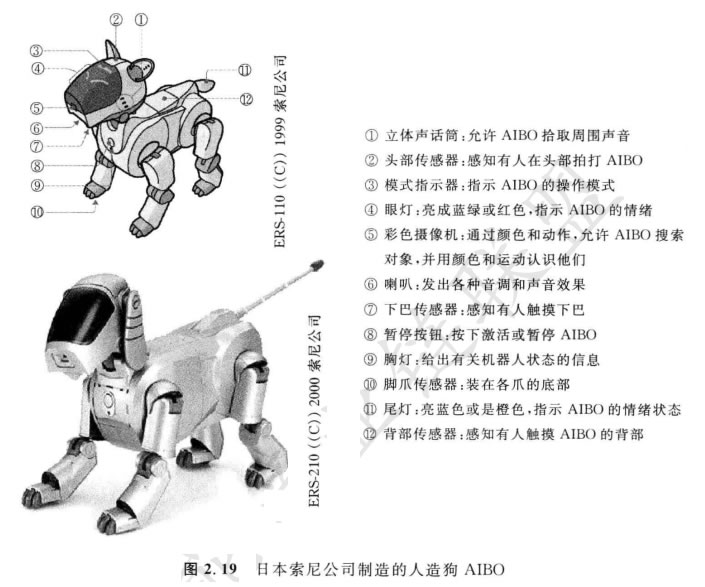
▒M╣▄╦─═╚šŠ┴ó▓╗äė(d©░ng)╩Ū¤oį┤ĘĆ(w©¦n)Č©Ą─Ż¼Ą½ę¬ąąū▀╚įŠ▀ėą╠¶æ(zh©żn)ąįĪŻę“?y©żn)ķį┌▓ĮąąŲ┌ķgŻ¼×ķ ┴╦▒Ż│ųĘĆ(w©¦n)Č©Ż¼ÖC(j©®)Ų„╚╦Ą─ųžą─ąĶę¬ų„äė(d©░ng)ĄžŲ½ęŲĪŻZĮ³Ż¼╦„─ß═Č┘YöĄ(sh©┤)░┘╚f├└į¬ķ_░l(f©Ī)ę╗éĆ(g©©)Įąū„AIBOĄ─╦─═╚ÖC(j©®)Ų„╚╦(łD2.19)ĪŻ×ķ┴╦ųŲū„▀@éĆ(g©©)ÖC(j©®)Ų„╚╦Ż¼╦„─ßķ_░l(f©Ī)┴╦Į³īŹ(sh©¬)Ģr(sh©¬)Ą─ą┬Ą─ ÖC(j©®)Ų„╚╦▓┘ū„ŽĄĮy(t©»ng)║═ą┬Ą─ć¦║Ž╦┼Ę■ļŖÖC(j©®)ĪŻ╦³Š▀ėąūŃē“┤¾Ą─┴”Šžęįų¦│ųÖC(j©®)Ų„╚╦Ż¼▀Ć╩Ū┐╔ ║¾Ž““ī(q©▒)äė(d©░ng)Ą─ęį▒ŻūC░▓╚½ĪŻ│²┴╦ķ_░l(f©Ī)īŻė├Ą─ļŖÖC(j©®)║═▄ø╝■ų«═ŌŻ¼╦„─ß╣½╦Š▀Ć▓Õ╚ļ┴╦ę╗éĆ(g©©) ▓╩╔½ęĢėXŽĄĮy(t©»ng)Ż¼╩╣AIBO ─▄ē“ūĘųę╗éĆ(g©©)╔½▓╩§rŲGĄ─Ū“ĪŻį┌ąĶę¬į┘│õļŖų«Ū░Ż¼ÖC(j©®)Ų„╚╦ų┴ ČÓ─▄╣żū„ę╗éĆ(g©©)ąĪĢr(sh©¬)ĪŻįōÖC(j©®)Ų„╚╦│§Ų┌õN┴┐į°Įø(j©®ng)║▄═·Ż¼Dę╗─ĻŠ═┘u┴╦60000ČÓ┼_(t©ói)ĪŻ┐╔╩ŪŻ¼ ▀@┼_(t©ói)ÖC(j©®)Ų„╣Ę╦∙ė├Ą─ļŖÖC(j©®)Ą─öĄ(sh©┤)┴┐║═╝╝ąg(sh©┤)═Č┘YŻ¼╩╣Ą├╦³Ą─╩█ār(ji©ż)Ė▀▀_(d©ó)╝s1500├└į¬ĪŻ
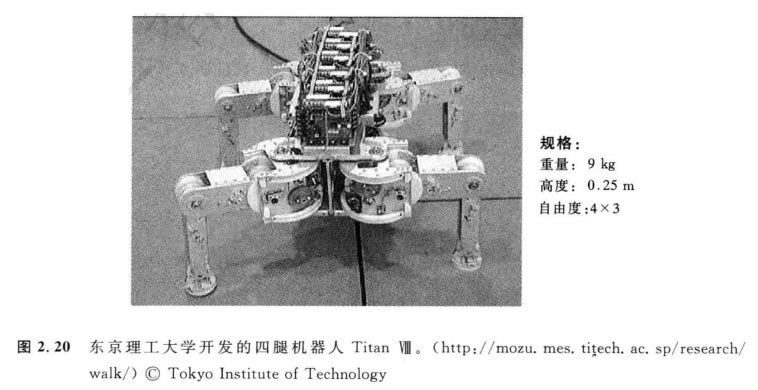
╦─═╚ÖC(j©®)Ų„╚╦į┌╚╦ÖC(j©®)Į╗╗źčąŠ┐ųąŻ¼Š▀ėą«ö(d©Īng)ū„ėąą¦╚╦įņ«a(ch©Żn)ŲĘĄ─Øō─▄(łD2.20)ĪŻ▒╚╚ńŻ¼ ╚╦ŅÉ┐╔ęįŽ±ī”(du©¼)┤²īÖ╬’ę╗śėī”(du©¼)┤²▀@éĆ(g©©)╦„─ßÖC(j©®)Ų„╚╦Ż¼▓ó┐╔ęįŽ±╚╦║═╣Ę─Ūśė░l(f©Ī)š╣ĖąŪķ┬ō(li©ón)ŽĄĪŻ ┤╦═ŌŻ¼╦„─ßęčįO(sh©©)ėŗ(j©¼)┴╦AIBO Ą─ąąū▀┐Ņ╩ĮŻ¼ęį╝░─ŻĘ┬īW(xu©”)┴Ģ(x©¬)║═╩ņ╗»Ą─ę╗░Ńąą×ķŻ¼╝┤ļSĢr(sh©¬)╔·äė(d©░ng)æB(t©żi)ąą×ķŻ¼▀@ī”(du©¼)┐╔ęįūĘ█Öąą×ķūā╗»Ą─╬’ų„üĒšfĢ■(hu©¼)Ė³╝ėĖą┼d╚żĪŻį┌ĮŌøQ┴╦Ė▀─▄┤µā”(ch©│)║═ļŖÖC(j©®)╣ż╦ćļyŅ}║¾Ż¼╦──_ÖC(j©®)Ų„╚╦┐╔─▄▒╚AIBO ėąĖ³ÅŖ(qi©óng)Ą─╣”─▄Ż¼╦³Ģ■(hu©¼)į┌╚½╚╦ŅÉŁh(hu©ón)Š│ųąĄ├ ęįŲš╝░ ĪŻ
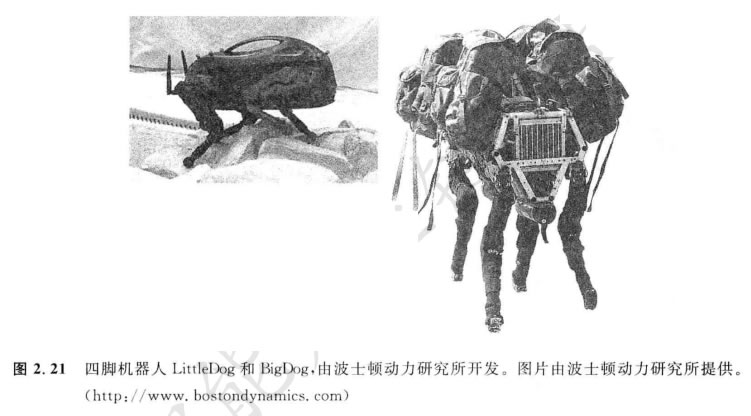
BigDog ║═LittleDog(łD2.21)╩Ū╦──_ÖC(j©®)Ų„╚╦Ą─Zą┬└²ūėŻ¼╦³éā╩Ū╩▄├└ć°ć°Ę└Ž╚ ▀M(j©¼n)蹊┐ĒŚ(xi©żng)─┐Šų(DARPA) ╬»═ąŻ¼ė╔▓©╩┐ŅDäė(d©░ng)┴”蹊┐╦∙ķ_░l(f©Ī)Ą─ÖC(j©®)Ų„╚╦ĪŻBigDog╩Ūę╗éĆ(g©©) ┤ų▓┌Ąžą╬Ą─ÖC(j©®)Ų„╚╦Ż¼─▄ē“ū▀Īó┼▄Īó┼└Ż¼▓ó▀\(y©┤n)▌dųžžō(f©┤)║╔ĪŻ╦³ė╔ę╗éĆ(g©©)░l(f©Ī)äė(d©░ng)ÖC(j©®)║═“ī(q©▒)äė(d©░ng)ę║ē║╝żäŅ(l©¼)ŽĄĮy(t©»ng)╠ß╣®äė(d©░ng)┴”ĪŻ╦³Ą─═╚Ž±äė(d©░ng)╬’ę╗śė┼c▀mÅ─į¬╝■ŽÓ▀BŻ¼╬³╩šš±äė(d©░ng)Ż¼▓óį┌Č■▓Įų«ķg裣h(hu©ón)─▄ ┴┐ĪŻįōĒŚ(xi©żng)─┐Ą──┐Ą─Ż¼╩Ū╩╣ÖC(j©®)Ų„╚╦─▄ē“╚ź╚╦║═äė(d©░ng)╬’─▄ē“╚źĄ─╚╬║╬ĄžĘĮĪŻ▀@éĆ(g©©)ĒŚ(xi©żng)─┐ė╔ DARPA Ą─æ(zh©żn)ąg(sh©┤)╝╝ąg(sh©┤)▐k╣½╩ę┘Yų·ĪŻŽÓĘ┤Ż¼LittleDog╩Ūę╗éĆ(g©©)ąĪ│▀┤ńĄ─ÖC(j©®)Ų„╚╦Ż¼╦³╩Ū×ķ蹊┐īW(xu©”)┴Ģ(x©¬)▀\(y©┤n)äė(d©░ng)Č°įO(sh©©)ėŗ(j©¼)Ą─ĪŻ╦³Ą─├┐Śl═╚Š▀ėą┤¾Ą─▀\(y©┤n)äė(d©░ng)ĘČć·Ż¼▓óė╔3éĆ(g©©)ļŖÖC(j©®)╣®─▄┴┐ĪŻ╦∙ęįŻ¼ ▀@éĆ(g©©)ÖC(j©®)Ų„╚╦į┌┼└ąą║═äė(d©░ng)æB(t©żi)▀\(y©┤n)äė(d©░ng)▓ĮæB(t©żi)ĘĮ├µŻ¼Š▀ėąūŃē“ÅŖ(qi©óng)Ą─╣”─▄ĪŻ
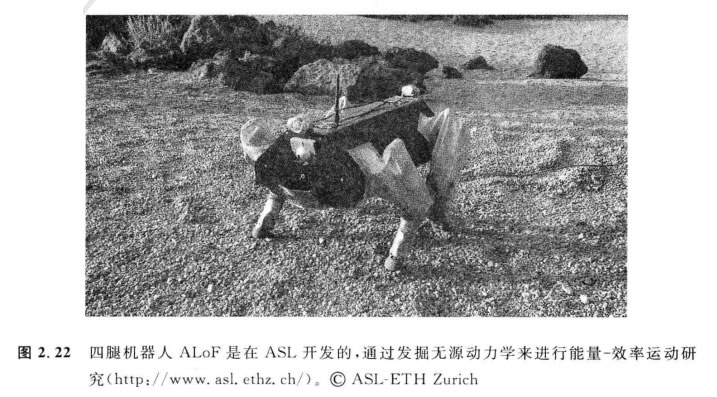
┴Ēę╗éĆ(g©©)╦─═╚ÖC(j©®)Ų„╚╦Ą─└²ūė╩ŪALoF, įōÖC(j©®)Ų„╚╦╩Ūį┌ASL(╠K└Ķ╩└╚╩┐┬ō(li©ón)░Ņ└Ē╣ż┤¾īW(xu©”))ķ_ ░l(f©Ī)Ą─(łD2.22)ĪŻ╦³▒╗«ö(d©Īng)ū„ę╗éĆ(g©©)ŲĮ┼_(t©ói)Ż¼čąŠ┐─▄┴┐-ą¦┬╩▀\(y©┤n)äė(d©░ng)ĪŻ▀@╩Ū═©▀^░l(f©Ī)Š“¤oį┤äė(d©░ng)┴”īW(xu©”)üĒ▀M(j©¼n) ąąĄ─Ż¼ŲõĘĮĘ©╚ń═¼2.2.2╣Ø(ji©”)╦∙ĻU╩÷Ą─ę╗śėŻ¼╦³į┌ļp─_ÖC(j©®)Ų„╚╦ųą▒╗ūC├„╩Ūėąą¦Ą─ĪŻ
 |
| ÖC(j©®)Ų„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖC(j©®)Ų„╚╦ ųvĮŌÖC(j©®)Ų„╚╦ ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P ╔╠ė├ÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ š╣ÅdÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖC(j©®)Ų„╚╦ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ |


