¼Fį┌╩ął÷╔Ž╣®æ¬Ą─╣żśIÖCŲ„╚╦Ż¼ŲõĻP╣ØöĄ×ķ3Ī½7éĆĪŻZĄõą═Ą─╣żśIÖCŲ„╚╦Š▀ėą6éĆĻP ╣ØŻ¼┤µį┌6éĆūįė╔Č╚Ż¼Ä¦ėąŖA╩ų(═©│ŻĘQ×ķ╩ų╗“─®Č╦ł╠ąąčbų├)ĪŻą┴ą┴─Ū╠ß-├ū└Ł┐╦²ł T3 Īó ė╚─ß├Ę▀dĄ─PUMA 650 ║═╦╣╠╣ĖŻÖCąĄ╩ųČ╝╩ŪŠ▀ėą6éĆĻP╣ØĄ─╣żśIÖCŲ„╚╦Ż¼▓óĘųäeė╔ę║ē║Īó ÜŌē║╗“ļŖÜŌé„äėčbų├“īäėĪŻŲõųąŻ¼╦╣╠╣ĖŻÖCąĄ╩ųŠ▀ėąĘ┤ü┐žųŲŻ¼╦³Ą─ę╗éĆĻP╣Ø┐žųŲĘĮ┐“łD ╚ńłD5-11╦∙╩ŠĪŻÅ─łD┐╔ęŖŻ¼╦³ėąéĆ╣ŌīWŠÄ┤aŲ„Ż¼ęį▒Ń┼c£y╦┘░lļŖÖCę╗ŲĮM│╔╬╗ų├║═╦┘Č╚Ę┤üĪŻ▀@ĘN╣żśIÖCŲ„╚╦╩Ūę╗ĘNČ©╬╗čbų├Ż¼╦³Ą─├┐éĆĻP╣ØČ╝ėąę╗éĆ╬╗ų├┐žųŲŽĄĮyĪŻ
łD5 - 11 ╦╣╠╣ĖŻÖCąĄ╩ųĄ─╬╗ų├┐žųŲŽĄĮyĘĮ┐“łD
╚ń╣¹▓╗┤µį┌┬ĘÅĮ╝s╩°Ż¼─Ū├┤┐žųŲŲ„ų╗ę¬ų¬Ą└ŖA╩ųę¬Įø▀^┬ĘÅĮ╔Ž╦∙ėąųĖČ©Ą─▐DÅسcŠ═ē“ ┴╦ĪŻ┐žųŲŽĄĮyĄ─▌ö╚ļ╩Ū┬ĘÅĮ╔Ž╦∙ąĶę¬▐DÅسcĄ─Ąč┐©ā║ū°ś╦Ż¼▀@ą®ū°ś╦³c┐╔─▄═©▀^ā╔ĘNĘĮĘ© ▌ö╚ļŻ¼╝┤Ż║
1)ęįöĄūųą╬╩Į▌ö╚ļŽĄĮyĪŻ
2)ęį╩ŠĮ╠ĘĮ╩Į╣®ĮoŽĄĮyŻ¼╚╗║¾▀Mąąū°ś╦ūāōQŻ¼╝┤ėŗ╦ŃĖ„ųĖČ©▐DÅسc╠Äį┌Ąč┐©ā║ū°ś╦ ŽĄųąĄ─ŽÓæ¬ĻP╣Øū°ś╦[q₁,ĪŁ,q₆] ĪŻ ėŗ╦ŃĘĮĘ©┼cū°ś╦³cą┼╠¢▌ö╚ļĘĮ╩ĮėąĻPĪŻ
ī”ė┌öĄūų▌ö╚╦ĘĮ╩ĮŻ¼ī”f-¹[q₁,ĪŁ,q₆] ▀MąąöĄūųėŗ╦ŃŻ╗ī”ė┌╩ŠĮ╠▌ö╚ļĘĮ╩ĮŻ¼▀Mąą ─ŻöMėŗ╦ŃĪŻŲõųąŻ¼f-¹[qi,ĪŁ,q₆] ×ķf[q₁,ĪŁ,q₆] Ą──µ║»öĄŻ¼Č° f[q₁,ĪŁ,q₆] ×ķ║¼ėą ┴∙éĆū°ś╦öĄųĄĄ─╩Ė┴┐║»öĄĪŻZ║¾Ż¼ī”ÖCŲ„╚╦Ą─ĻP╣Øū°ś╦³cų³c▀MąąČ©╬╗┐žųŲĪŻ╝┘╚ńį╩įS ÖCŲ„╚╦ę└┤╬ų╗ęŲäėę╗éĆĻP╣ØŻ¼Č°░čŲõ╦¹ĻP╣صiūĪŻ¼─Ū├┤├┐éĆĻP╣Ø┐žųŲŲ„Č╝║▄║åå╬ĪŻ╚ń╣¹ ČÓéĆĻP╣Ø═¼Ģr▀\äėŻ¼─Ū├┤Ė„ĻP╣Øķg┴”Ą─╗źŽÓū„ė├Ģ■«a╔·±Ņ║ŽŻ¼╩╣┐žųŲŽĄĮyūāĄ├Å═ļsĪŻ
å╬ĻP╣Ø┐žųŲŲ„Ą─é„▀f║»öĄ
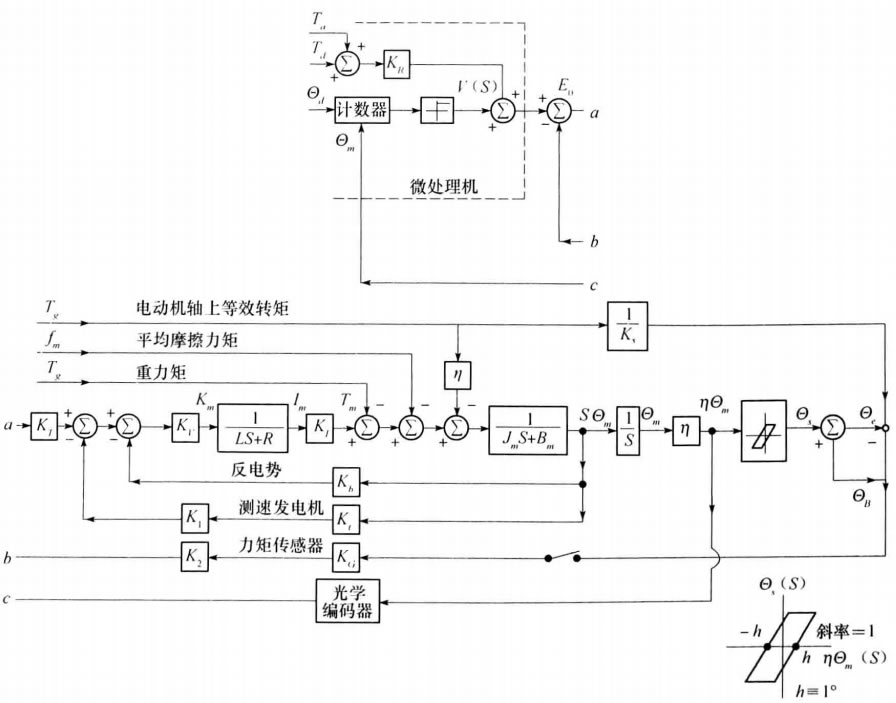
░čÖCŲ„╚╦┐┤ū÷äé¾wĮYśŗĪŻłD5-12Įo│÷å╬éĆĻP╣ØĄ─ļŖäėÖC²X▌å-žō▌d┬ō║Žčbų├╩ŠęŌłDĪŻ
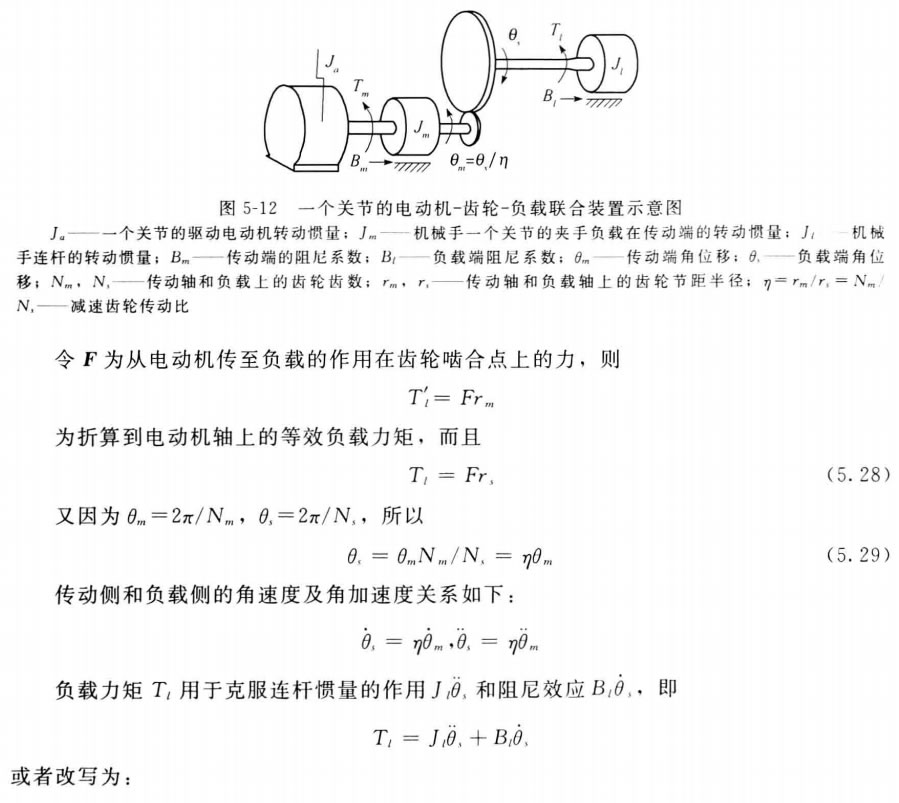
ÖCŲ„╚╦╬╗ų├┐žųŲėąĢrę▓ĘQ╬╗ū╦┐žųŲ╗“▄ē█E┐žųŲ,ų„ę¬ėąā╔ĘNÖCŲ„╚╦Ą─╬╗ų├┐žųŲĮYśŗą╬╩ĮŻ¼╝┤ĻP╣Ø┐šķg┐žųŲĮYśŗ║═ų▒ĮŪū°ś╦┐šķg┐žųŲĮYśŗ;ÖCŲ„╚╦Ą─╦┼Ę■┐žųŲĮYśŗėą╝»ųą┐žųŲĪóĘų╔ó┐žųŲ║═▀fļA┐žųŲĄ╚
ę║ē║é„äėÖCŲ„╚╦Š▀ėąĮYśŗ║åå╬ĪóÖCąĄÅŖČ╚Ė▀║═╦┘Č╚┐ņĄ╚ā׳c;ę╗░Ń▓╔ė├ę║ē║╦┼Ę■┐žųŲķy║═─ŻöMĘųĮŌŲ„īŹ¼F┐žųŲ║═Ę┤ü,╩Ī╚źųąķgäė┴”£p╦┘Ų„Ż¼Å─Č°Ž¹│²┴╦²XŽČ║═─źōpå¢Ņ}
ÖCŲ„╚╦┐žųŲŲ„Š▀ėąČÓĘNĮYśŗą╬╩Į,░³└©ĘŪ╦┼Ę■┐žųŲĪó╦┼Ę■┐žųŲĪó╬╗ų├║═╦┘Č╚Ę┤ü┐žųŲĪó┴”(┴”Šž)┐žųŲĪó╗∙ė┌é„ĖąŲ„Ą─┐žųŲĪóĘŪŠĆąį┐žųŲĪóĘųĮŌ╝ė╦┘Č╚┐žųŲĪó╗¼─Ż┐žųŲĪóūŅā× ┐žųŲĪóūį▀mæ¬┐žųŲĪó▀fļA┐žųŲęį╝░Ė„ĘNųŪ─▄┐žųŲĄ╚
ļŖÖC┼c£p╦┘Ų„╩Ūśŗ│╔ÖCŲ„╚╦ĻP╣Ø“īäėŽĄĮyĄ─║╦ą─ÖCļŖĮM╝■;é„ĖąŲ„┼cĖąų¬─ŻĮMė├ė┌īŹĢr½@╚ĪÖCŲ„╚╦ūį╔ĒĀŅæB╝░┼cŁhŠ│Į╗╗źą┼ŽóĄ─Ėąų¬å╬į¬;ÖCŲ„╚╦┤¾─XŽĄĮyžōž¤Ėąų¬║═ęÄäØøQ▓▀
ŅlūVłDĘ©īóšZ궹┼╠¢Ą─ŅlūVčžų°Ģrķg▌S╝ėęįš╣ķ_,ūRäeŠ½Č╚ę╗░Ń;LPCĘ©╩Ūī”šZ궹┼╠¢│ķ╚ĪLPCŽĄöĄ;ļ[▓ž╩Į±R┐╔Ę“─Ż╩Įė├ė┌ĘŪ╠žČ©╚╦Ą─šZę¶ūRäe,Į©┴óšZ궥─ĀŅæB▐DęŲ─Ż╩Į
ÖCŲ„╚╦═©▀^özŽ±Ņ^▀@ą®═ŌįO½@Ą├łDŽ±ų«║¾,└¹ė├─│ĘN╦ŃĘ©üĒ▀MąąłDŽ±ų«ķgĄ─ūāōQ,ī”łDŽ±▀MąąĖ„ĘN▓┘ū„ęį▀_ĄĮ╦∙ąĶę¬īŹ¼FĄ─╣”─▄;³c▀\╦ŃĖ─╔ŲłDŽ±Ą─’@╩Šą¦╣¹
ė╔łDŽ±▓╔╝»ŽĄĮy,łDŽ±╠Ä└ĒŽĄĮy╝░ą┼ŽóŠC║ŽĘų╬÷╠Ä└ĒŽĄĮyśŗ│╔;ÖCŲ„╚╦Ą─ęĢėXŻ¼┤¾Ė┼┐╔ęį└ĒĮŌ×ķĪ░ęĢĪ▒║═Ī░ėXĪ▒ ā╔▓┐Ęų;ŽĄĮyų„ę¬ė╔łDŽ±▓╔╝»▓┐╝■ĪółDŽ±Ą─╠Ä└Ē║═Ęų╬÷Īó╠Ä└ĒĮY╣¹▌ö│÷čbų├
╚½ŠųęÄäØĘĮĘ©ę└ššęč½@╚ĪĄ─ŁhŠ│ą┼Žó,ĮoÖCŲ„╚╦ęÄäØ│÷ę╗Śl┬ĘÅĮ,┬ĘÅĮĄ─Š½┤_│╠Č╚╚ĪøQė┌½@╚ĪŁhŠ│ą┼ŽóĄ─£╩┤_│╠Č╚;Šų▓┐ęÄäØĘĮĘ©é╚ųžė┌┐╝æ]ÖCŲ„╚╦«öŪ░Ą─Šų▓┐ŁhŠ│ą┼Žó
ÖCŲ„╚╦Ą─ęĢėXŽĄĮy╩Ū═©▀^łDŽ±║═ŠÓļxĄ╚é„ĖąŲ„üĒ½@╚ĪŁhŠ│ī”Ž¾Ą─łDŽ±ĪóŅü╔½║═ŠÓļxĄ╚ą┼ŽóŻ¼╚╗║¾é„▀fĮołDŽ±╠Ä└ĒŲ„Ż¼└¹ė├ėŗ╦ŃÖCÅ─Č■ŠSłDŽ±ųą└ĒĮŌ║═śŗįņ│÷╚²ŠS╩└ĮńĄ─šµīŹ─Żą═
Įėė|ūRäe▀@ĘN£y┴┐ę╗░ŃŠ½Č╚▓╗Ė▀;▓╔śė╩Į£y┴┐╚ń£y┴┐─│ę╗─┐ś╦Ą─╬╗ų├ĪóĘĮŽ“║═ą╬ĀŅ;ŠÓļx£y┴┐£y┴┐─│ę╗─┐ś╦ĄĮ─│ę╗╗∙£╩³cĄ─ŠÓļx;ÖCąĄęĢėXūRäe£y┴┐─│ę╗─┐ś╦ŽÓī”ė┌ę╗╗∙£╩³cĄ─╬╗ų├ĘĮŽ“║═ŠÓļx
═¾┴”é„ĖąŲ„░▓čbį┌ÖCŲ„╚╦╩ų▒█║═─®Č╦ł╠ąąŲ„ų«ķgŻ¼Ė³ĮėĮ³┴”Ą─ū„ė├³c,£╩┤_ĄžÖz£y─®Č╦ł╠ąąŲ„╦∙╩▄═Ō┴”/┴”ŠžĄ─┤¾ąĪ║═ĘĮŽ“,×ķÖCŲ„╚╦╠ß╣®┴”Ėąą┼Žó,öUš╣┴╦ÖCŲ„╚╦Ą─ū„śI─▄┴”
6éĆé„ĖąŲ„śŗ│╔╚²ŠS£y┴┐ū°ś╦ŽĄŻ¼ Ųõųąé„ĖąŲ„1Īó2Īó3ī”欣y┴┐├µ xOy, é„ĖąŲ„4Īó5ī”欣y┴┐├µ xOz, é„ĖąŲ„6ī”欣y┴┐├µ yOz ĪŻ ├┐éĆé„ĖąŲ„į┌ū°ś╦ŽĄųąĄ─╬╗ų├╣╠Č©Ż¼▀@6éĆé„ĖąŲ„╦∙ś╦Č©Ą─£y┴┐ĘČć·Š═╩Ūįō£y┴┐ŽĄĮy Ą─£y┴┐ĘČć·




