

╚╦ą╬ÖCŲ„╚╦į┌╔╠śI╗»▀M│╠ųą├µ┼Rų°Å═ļs╚╬äšł╠ąąļyČ╚┤¾,Į╗╗ź─▄┴”▓╗ūŃĪóčą░l│╔▒ŠGĪół÷Š░Ė▓╔wĄ═Ą╚å¢Ņ}ĪŻļSų°Al┤¾─Żą═╝╝ąg▓╗öÓ░lš╣,┤¾─Żą═┐╔╝ė┐ņ╚╦ą╬ÖCŲ„╚╦Å═ļs╚╬äšė¢ŠÜ╦┘Č╚,╠ß╔²╚╬äš╔·│╔╦┘Č╚╝░┐sČ╠└ĒĮŌų▄Ų┌, ┤┘╩╣╚╦ą╬ÖCŲ„╚╦į┌šZčį╠Ä└ĒĪół÷Š░└ĒĮŌĪó▀\äė┐žųŲĄ╚ĘĮ├µ╝ė╦┘═╗ŲŲ,ł╠ ąąĖ³ČÓÅ═ļs╚╬äšł÷Š░,╝ė╦┘Ųõ═©ė├╗»║═ųŪ─▄╗»▀M│╠ĪŻ
| ┤¾─Żą═ | ėŅ╔╠ | šf├„ |
| ChatGPT for Robotics | ╬ó▄ø | Ä═ų·╚╦ÖCŲ„╚╦Ė³║├└ĒĮŌė├æ¶ąĶŪ¾║═ųĖ┴Ņ,╠ß╔²╚╬äšł╠ąą£╩┤_Č╚ |
| Robocat | ╣╚ĖĶ | ╗∙ė┌ČÓ─ŻæB┤¾─Żą═Gatoķ_░lČ°│╔,īóGato╝▄śŗ┼c┤¾┴┐łDŽ±ą“┴ą║═╚╦ą╬ ÖCŲ„╚╦╩ų▒█äėū„ė¢ŠÜöĄčą╝»╝»║Ž,ĮŌøQ▓╗═¼╚╬äš |
| RT-2 | ╣╚ĖĶ | Įė╩▄ŠWĮją┼Žó║═łDŽ±,ė¢ŠÜ╚╦ą╬ÖCŲ„╚╦ł╠ąą╚╬äš |
| VoxPoser |
╦╣╠╣ĖŻ └Ņ’w’włFĻĀ |
Å─┤¾šZčį─Żą═║═ęĢėX-šZčį─Żą═╠ß╚ĪŲ„ÖCĢ■║═╝s╩°,śŗĮ©3DĄžłD,┴Ńśė ▒ŠŪķørŽ┬,└ĒĮŌųĖ┴ŅĪóĘųĮŌ╚╬äšĪóęÄē“┬ĘÅĮ |
| RT-X |
╣╚ĖĶ Deepmind |
╠žČ©╚╬äš╣żū„ą¦┬╩╩Ū═¼ŅÉą═ÖCŲ„╚╦Ą─╚²▒Č,┐╔ł╠ąą╬┤ė¢ŠÜäėū„ |
| Eureka | ėóéź▀_ | ūįų„ŠÄīæ¬ääŅ╦ŃĘ©ė¢ŠÜ╚╦ą╬ÖCŲ„╚╦,īW┴ĢÅ═ŠÜ▀\äė┐žųŲ─▄┴” |
| ░ó└’įŲÖCŲ„╚╦┤¾ ─Żą═ | ░ó└’įŲ | ┘xėĶ╚╦ą╬ÖCŲ„╚╦ų¬ūRÄņå¢┤Īó╣ż╦ć┴„│╠┤·┤a╔·│╔ĪóÖCąĄ▒█▄ē█EęÄē“Īó 3D ─┐ś╦Öz£y║═äėæBŁhŠ│└ĒĮŌĄ╚─▄┴” |
| ╚A×ķ▒P╣┼┤¾─Żą═ | ╚A×ķ | ╠ß╔²╚╦ą╬ÖCŲ„╚╦šZ┴x└ĒĮŌĪóäėæBęÄē“ĪóČÓ─ŻæBą┼╠¢└ĒĮŌĄ╚─▄┴” |
|
śĘŠ█ÖCŲ„╚╦┐õĖĖMY X▒P╣┼┤¾─Żą═ • ī”ÖCŲ„╚╦Ę║╗»─▄┴”Ą─╠ß╔²š╣ķ_┬ō║Žäōą┬ |
|
Figure 01XOpen AI • ╠ß╔²GJęĢėX║═šZčįųŪ─▄─▄┴” |
|
ā×▒ž▀xX╬─ą─Ī¬čį • ╠ß╔²╚╬äšęÄäØ┼cł╠ąą─▄┴” |
|
ųŪį¬ÖCŲ„╚╦X▄ø═©äė┴” • ═Ųäė┤¾─Żą═┼c╚╦ą╬ÖCŲ„╚╦æ¬ė├ |
|
ąŪēmųŪ─▄X┤¾─Żą═ • Įė╚ļČÓ─ŻæB┤¾─Żą═,╠ß╔²▒Š¾w▓┘ū„─▄┴” |
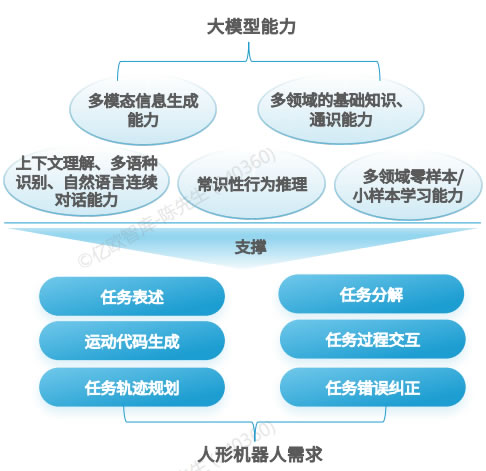
╚╦ą╬ÖCŲ„╚╦ąĶŪ¾
1 ╠ß╔²╚╦ą╬ÖCŲ„╚╦šZčį╠Ä└Ē─▄┴”
2 ╠ß╔²╚╦ą╬ÖCŲ„╚╦ł÷Š░└ĒĮŌ─▄┴”
3 ╠ß╔²╚╦ą╬ÖCŲ„╚╦▀\äė┐žųŲ─▄┴”
4 ╠ß╔²╚╦ą╬ÖCŲ„╚╦öĄō■ė¢ŠÜ─▄┴”
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



